
Nachdem ich alle Lüfter getauscht hatte, war ich mit dem Ergebnis in Sachen Geräuschoptimierung schon sehr zufrieden, aber wie das so ist wenn man einmal Blut geleckt hat - ich wollte den Optimierungsgedanken zu Ende bringen und habe (schneller als gedacht) im Anycubic I3 Mega alle Gleitlager (inkl. der Führungen) sowie die Treiberbausteine für den Antrieb der Steppermotoren gegen bessere Versionen getauscht.
Hinweis : Bei den folgenden Umbauten sind Einstellarbeiten bei eingeschalteten Gerät mit 230V Netzspannung nötig. Wer nicht weiß, wie was zu tun ist, sollte diesen Umbau einem Fachmann überlassen. Lebensgefahr!
TMC2208 macht laute Steppermotoren leise
Zum Tausch der Steppermotoren gibt es zig Anleitungen im Internet, wobei nicht alle umfänglich sind. Ich habe etwas länger gebraucht, bis ich alle Informationen zusammen getragen hatte. Als erstes stand natürlich die Materialbestellung auf dem Zettel...
- Eryone TMC2208 ** Treibermodule ( 4 Stück - siehe Text)
- Misumi Lager und gehärtete Wellen (Führungen)
Hinweis : Ich kann nur empfehlen, für die folgenden Umbauten ordentliches Werkzeug vorrätig zu haben. Zwar sind die beigelegten Innensechskannt (Inbus) Winkel ganz ok, wenn es aber darum geht, kraftschlüssig an den Lagern/Wellen zu arbeiten (und feste Schrauben sind da sehr wichtig) empfinde ich "richtiges" Werkzeug mit Griff und Biss am Schraubenkopf doch als besser. Ich habe mir dafür extra ein Innensechskant-Set von Wiha ** angeschafft.
Schritt 1 - Treibertausch auf TMC2208 Module
Bei Amazon und auch Ebay werden diverse Ausführungen der TMC2208 Module (auch in unterschiedlichen Versionen) angeboten, ich wollte nicht die günstigsten nehmen (da sind gerne welche schon bei Lieferung defekt), so dass ich mich für Module von Eryone entschieden habe (nicht zuletzt wegen der positiven Rezensionen).
Hinweis : Die folgenden Abschnitte beschreiben den Tausch / die Spannungs-Justierung der von mir bei Amazon gekauften Module von Eryone. Die Einbaurichtung sowie der Meßpunkt für die VRef Einstellung kann bei anderen Herstellern / Versionen anders sein!
Ich habe zwei Beutel á zwei Module bestellt, die Lieferzeit war deutlich kürzer als das Set mit fünf Modulen und den Treiber für den Extruder Stepper Motor (E0) kann man auch gut original belassen (ist eh nicht laut).
Die Montage ist eigentlich kein großes Thema, den Anycubic stromlos machen, von seiner Z-Achse befreien, umdrehen und die Bodenplatte abnehmen. Der Lüfter für das Trigorilla Board samt Halter muss ebenfalls demontiert werden. Dann vorsichtig (!) mit einem kleinen Schraubendreher / Keil die alten Module abhebeln, das Modul für E0 bleibt an seinem Platz
Die neuen Module (Kühlkörper noch nicht montieren) sanft&sorgfältig in die entsprechenden Stiftleisten drücken. Die drei kleinen, freien Lötaugen (dort wird später auch die VRef gemessen) zeigen zum Trigorilla-Logo.
Jetzt können die mitgelieferten Kühlkörper aufgeklebt werden, dabei nicht zu nah am Poti / den drei offenen Lötaugen kleben sonst wird die Einstellung der VRef Spannung schwierig / nicht durchführbar
Hinweis : Mittlerweile habe ich jetzt schon öfters im Internet gelesen, dass die Justierung der VRef an den neu installierten TMC2208 Modulen nicht notwendig ist und die auch problemlos "out of the box" funktionieren. Ich habe sie dennoch auf den empfohlenen Wert von 0,95 Volt justiert (falls das Modul für den Extruder E0 auch getauscht wird, der bekommt 1,1 Volt). Die Einstellung / Justage ist kein großes Thema wenn man ein Digitalmultimeter hat.
Letzte Amtshandlung auf dem Trigorilla Mainboard : Einstellen der VRef auf den neuen Modulen auf 0,95 Volt. Dazu muss der Drucker mit Strom versorgt und eingeschaltet werden, der Rahmen mit der Z-Achse, Extruder... muss dafür nicht montiert werden. Dafür muss der Anycubic jetzt wieder mit Netzspannung versorgt werden. Einschalten nicht vergessen 😉
VORSICHT : es liegen jetzt 230 V an der Kaltgerätebuchse sowie am Netzteil an ! Lebensgefahr !
Die Masse habe ich mir vom Gehäuse der USB Buchse geholt und mit einer schön feinen Meßspitze den aktuellen VRef Wert gemessen um danach (mit Gefühl!) den Trimmer so einzustellen, dass das Digitalmultimeter 0,95 (bzw möglichst nah dran) anzeigt. Es braucht schon etwas Fingerspitzengefühl, mit dem kleinen Trimmer (und dem sehr kleinen Schraubendreher) hat man schnell am benötigten Spannungswert vorbei gedreht.
Wenn sich die Spannung nicht verstellen lässt (meine Module waren ab Werk auf rund 1,2 Volt eingestellt), dann messt ihr entweder am falschen der drei Lötaugen oder ihr habt ein defektes Modul bekommen.
Sind alle neuen Module eingestellt, den Anycubic wieder ausschalten, Stromkabel abziehen und den 3D Drucker wieder komplettieren - den Lüfter für das Mainboard nicht vergessen.
Marlin Firmware 1.1.9 aufspielen
Wenn wir den Drucker nun einschalten stellen wir fest, das erstmal nichts passiert (was ja auch normal ist). Durch die neuen Treibermodule für die X,Y und Z Achse sind jedoch die Drehrichtungen gedreht, d.h. was vor dem Umbau "Z-Achse plus bzw. hoch" war, ist jetzt "Z-Achse minus / runter".
Aus diesem Grunde erstmal NICHT die Achsen fahren! Bevor wir uns an der neuen Stille der aktiven Stepper-Motoren erfreuen können, braucht der Anycubic noch eine entsprechend angepasste Firmware.
Hinweis : Natürlich könnte man auch die orignale Firmware auf dem Anycubic I3 Mega belassen und die Stecker am Trigorilla Board / am Motor drehen, aber ich finde es eleganter, dieses Thema über eine angepasste Firmware zu erledigen - und Merlin bietet gegenüber der Anycubic Firmware noch weitere Vorteile (siehe Merlin-Seite)
Hinweis 2 : Es gibt wohl mittlerweile TMC2208 Modelle (Version 2), wo das Drehen der Anschlüsse nicht mehr nötig ist, die von mir verbauten Module brauchen aber die Drehung.
Ich habe die Merlin Firmware in der Version 1.1.9 verwendet, welche man sich hier runterladen kann. Insgesamt gibt es drei Versionen zum Download, für die TMC2208 Module ohne Drehung an den Steckern benötigt man die PWM_Marlin-AI3M-190116-TMC2208.hex Datei.
Der Anycubic wird nun über USB (das passende Kabel liegt dem 3D Drucker bei) verbunden und die gerade heruntergeladene Firmware mittels Cura auf den I3 Mega geladen.
Hinweis : Im Video wird die Cura Version 15.04.6 benutzt, aktuell ist Version 3.6. Dort findet man die Firmware-Upgrade Funktion unter "Konfiguration -> Drucker -> Drucker verwalten" , die sonstige Vorgehensweise ist aber identisch. Für ein Firmware-Upgrade via USB Kabel müssen die Treiber (auf der Anycubic SD-Karte beiliegend) installiert sein.
Nach erfolgreichem Upgrade den Drucker einmal aus- und wieder einschalten und (vorsichtig!) die X, Y und Z Achsen fahren. Wenn alles gut gelaufen ist, sollten die Achsen so fahren, wie es auch vor dem Umbau der Fall war (also Z+ bedeutet hochfahren etc pp) und auch das Anfahren der Home-Position klappt.
Aber Halt! War da nicht der Extruder Motor (E0), welcher noch das alte Modul behalten hat? Richtig. Dieser arbeitet jetzt umgekehrt, d.h. wenn er Filament einziehen soll, dann schiebt er es raus Richtung Filament-Rolle. Diesen Fehler habe ich schnell behoben : den Stecker direkt am Extruder-Motor abgezogen (Anycubic wurde vorher stromlos gemacht), Stecker- und Buchsengehäuse vorsichtig mit einem Cutter angepasst, Stecker gedreht (sowie mit Heißkleber fixiert) und Voilá : jetzt drehen alle Motoren so, wie es vor dem Umbau der Fall war 🙂
Druck-Lautstärke nach TMC2208 Umbau
Um vor der Grafik von der Messung mal zu spoilern : ja, der Anycubic I3 Mega ist noch einmal deutlich leiser geworden, die Motoren sind nur noch in sehr ruhiger Umgebung wahrnehmbar, lustigerweise ist der (bereits von mir getauschte) Bauteillüfter jetzt wieder Tonangebend - ein Teufelskreis 😉
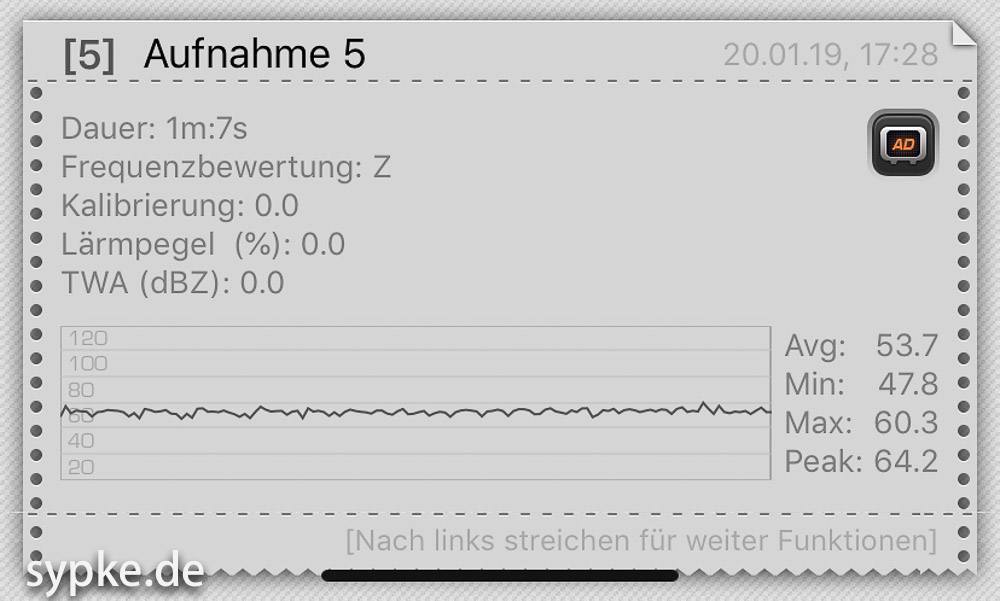
Auf jeden Fall hier nun der finale Vorher / Nachher Vergleich
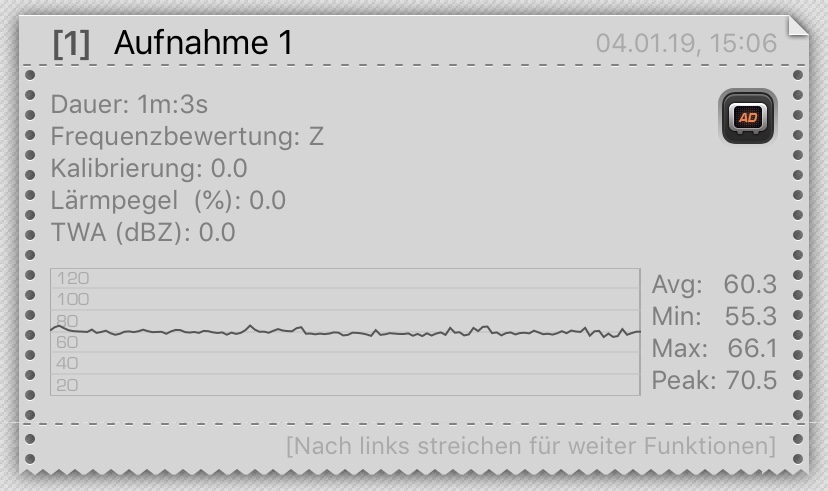
Der Drucker steht in meinem Büro und bei einer Online-Runde War Thunder (normale Lautstärke) musste ich mich mehrmals umdrehen, weil ich dachte der Drucker arbeitet nicht. Erstaunlich, was so ein Treiber-Modul-Tausch ausmacht.
Natürlich habe ich auch nach diesem Umbau noch eine Messung via iPhone aus gut 90cm Entfernung mit der iOS App "Decibel X" durchgeführt, welche auch die Lautstärkereduzierung im Druck (PLA TempTower) klar erkennbar zeigt

Alle Teile sind per Post angekommen, es kann losgehen 
Der I3 Mega ohne Z-Achse 
Mal wieder : Anycubic I3 Mega geöffnet 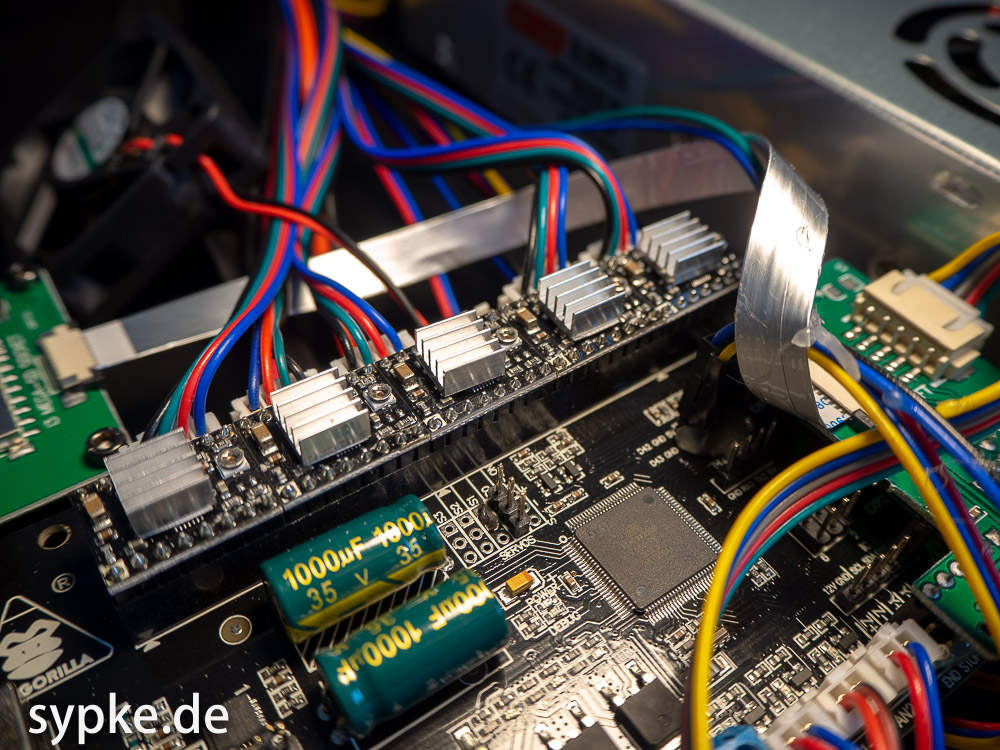
Die alten Treiber im Detail 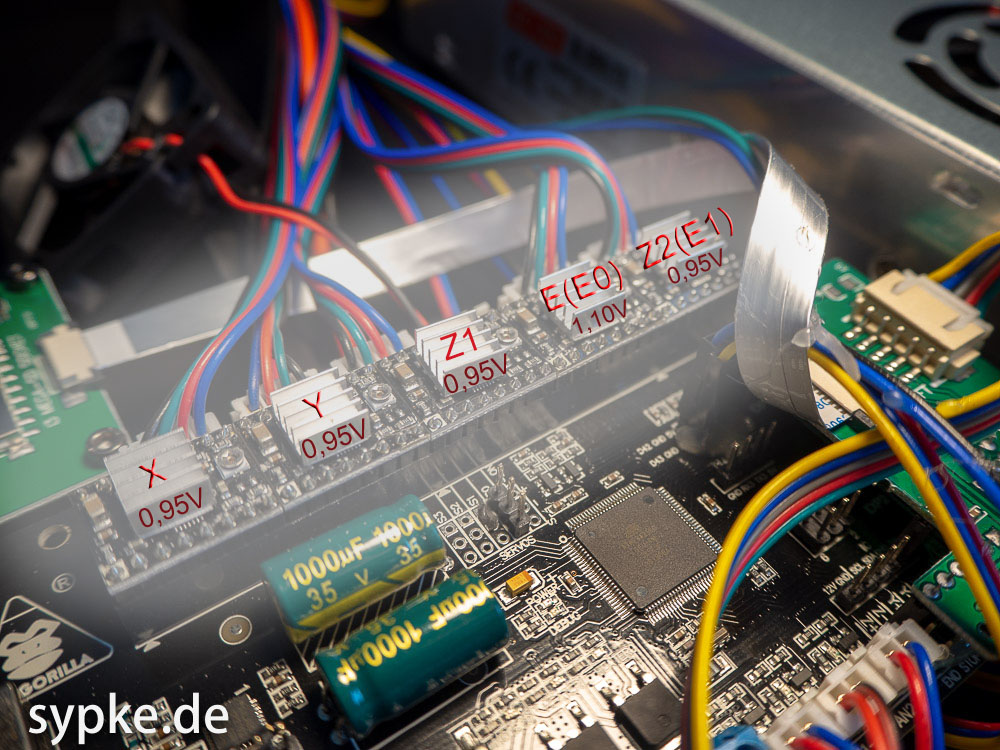
Welches Modul steuert welchen Motor und die passenden Spannungen 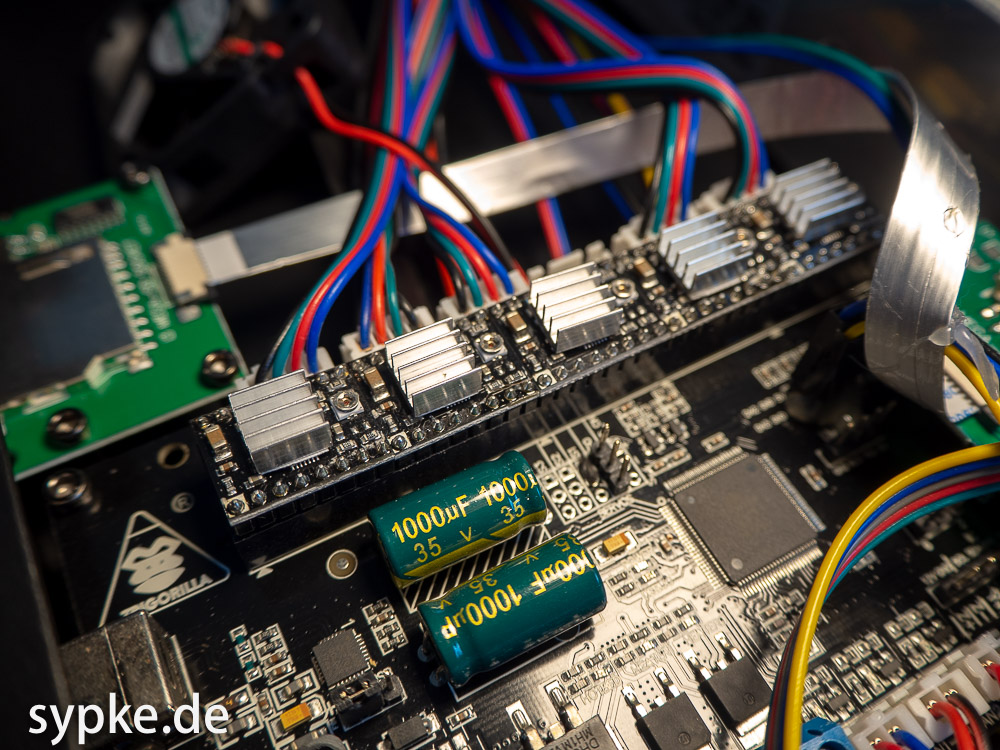
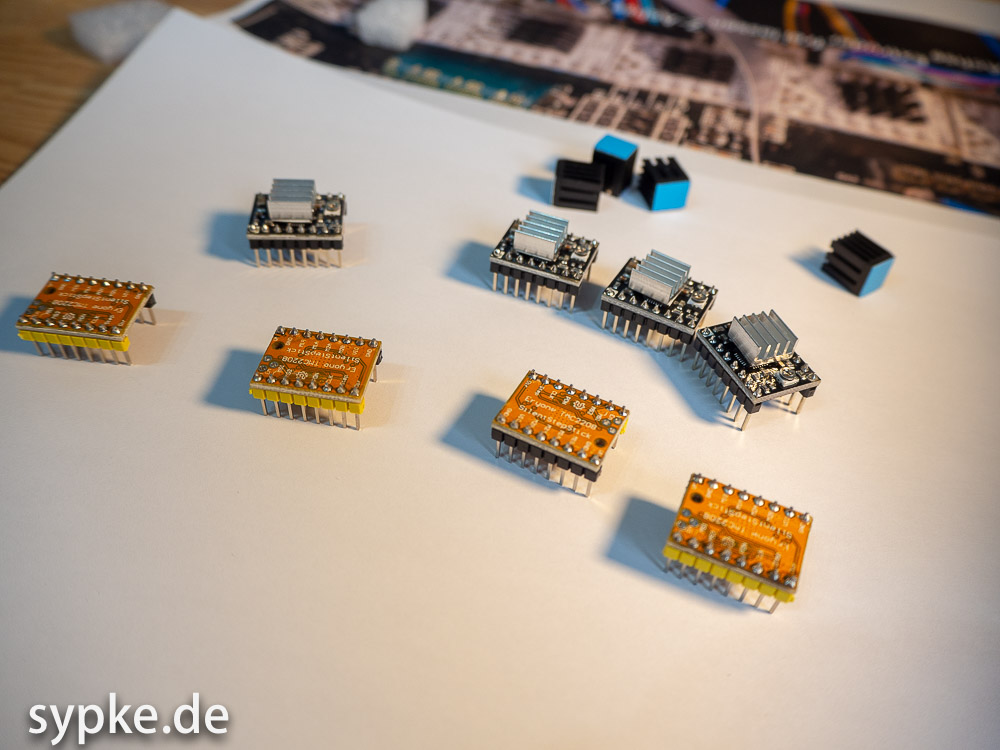
Alt vs Neu 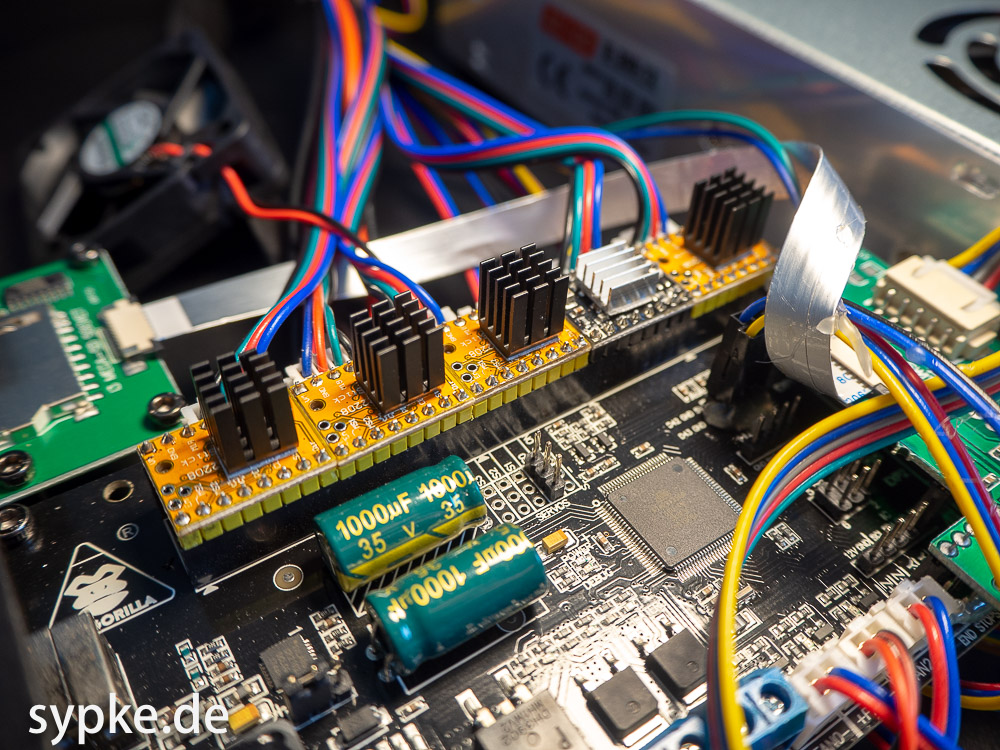
Die neuen TMC2208 Module stecken 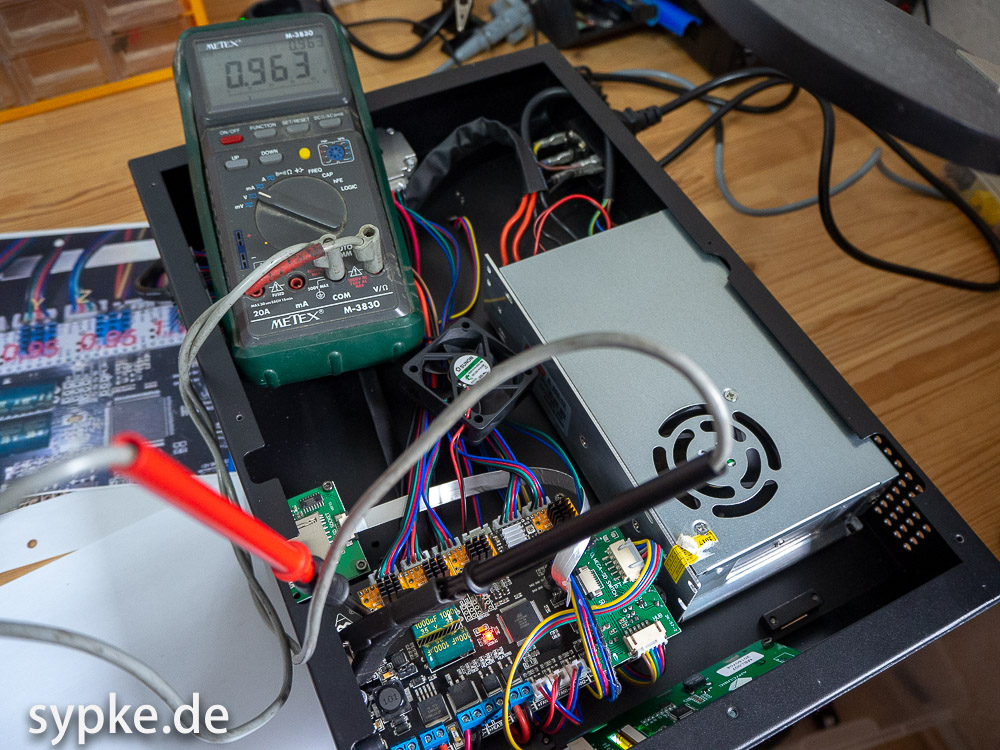
Bei den neuen Modulen muss die Referenzspannung noch eingestellt werden 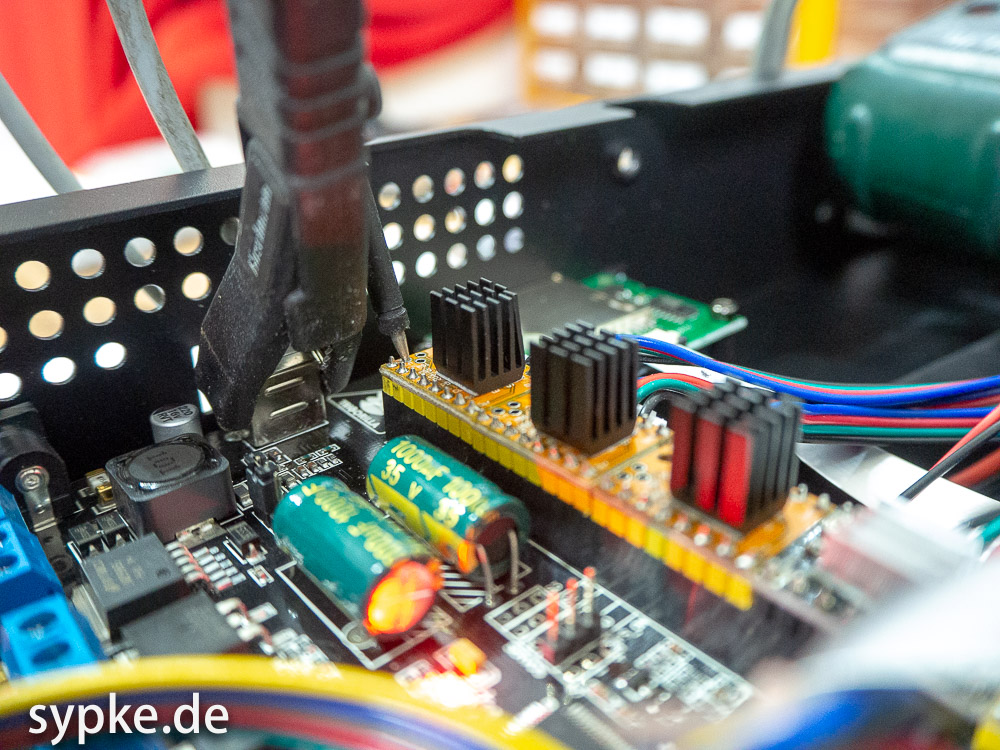
Detailaufnahme vom Meßpunkt, Masse kommt vom Gehäuse der USB Buchse 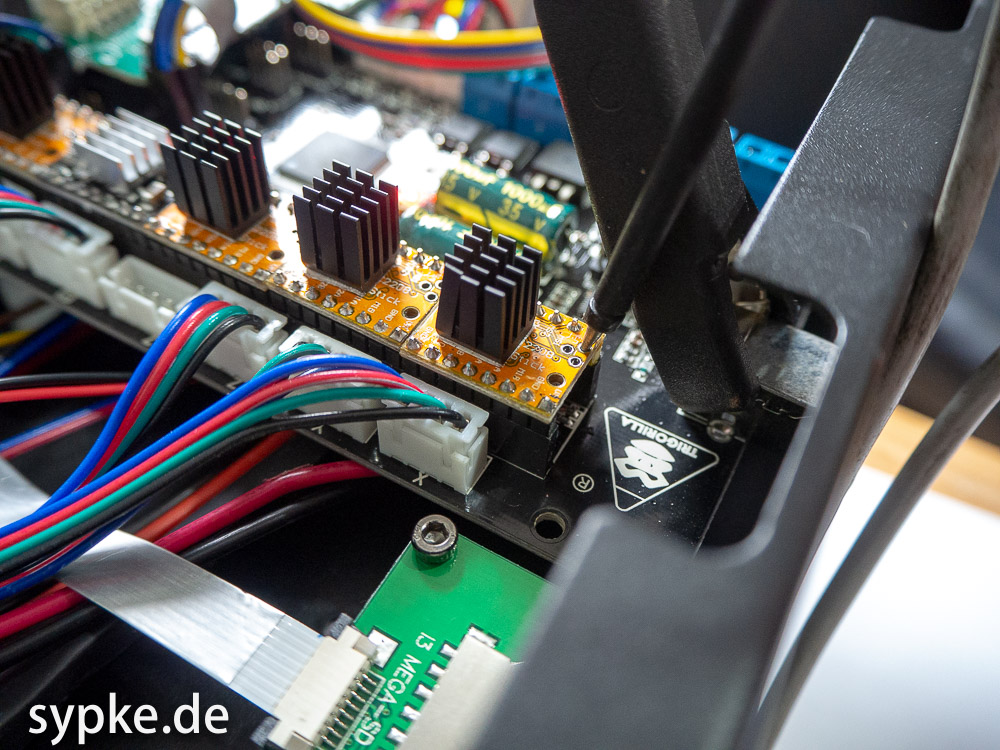
Detailaufnahme vom Meßpunkt, Masse kommt vom Gehäuse der USB Buchse 
Neue Firmware für den Anycubic 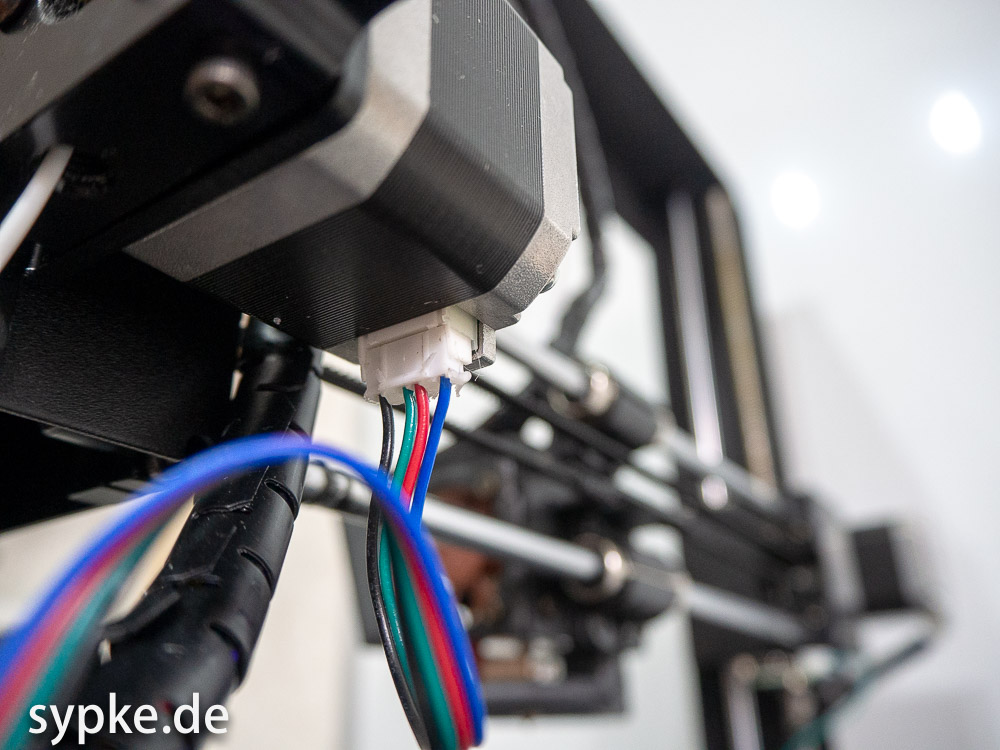
Originaler Anschluss am Extrudermotor 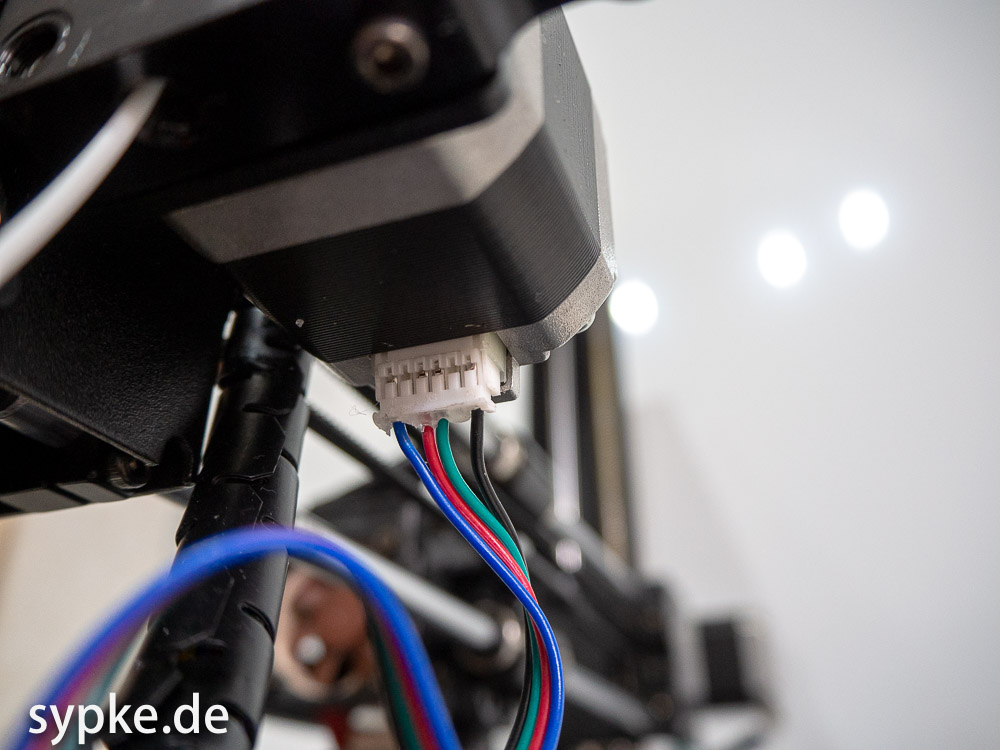
Gedrehter Anschluss am Extrudermotor 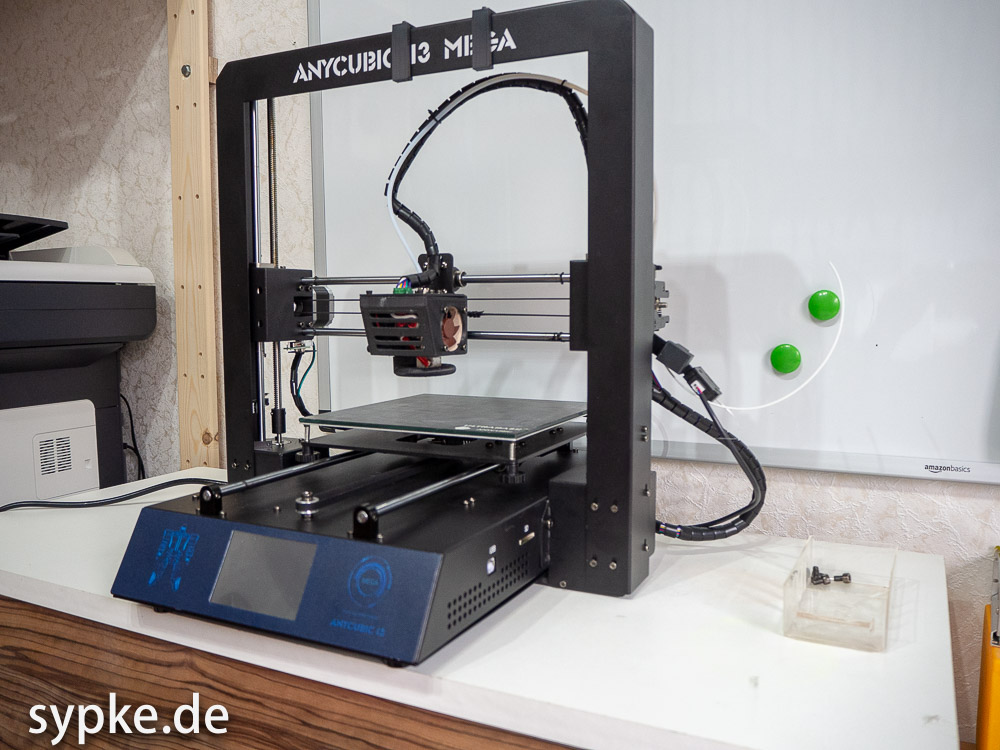
Der Umbau ist beendet, der Drucker druckt wieder - deutlich leiser
Umbau auf Misumi Lager und gehärtete Wellen
So, der erste Teil wäre geschafft, fehlen noch die gehärteten Wellen bzw Misumi Gleitlager. Da es im Landwehr-Shop einiges an Auswahl gibt, hier mal direkt die Teile, die ich dort bestellt habe :
- 1x Misumi Lager 5 Stück, Anycubic Kit
- 2x 8mm Welle, 330mm lang ( für die X-Achse )
- 2x8mm Welle, 360mm lang ( für die Y-Achse )
- Liqui Moly LM 47 Fett (sofern nich bereits was passendes vorhanden)
Den Einbau möchte ich jetzt gar nicht näher beschreiben, denn dafür gibt es bereits auf Facebook in der "Anycubic deutschsprachige Gruppe" unter "Dateien" eine echt gute Anleitung in zwei Teilen, welche ich auch genutzt habe. Zwar beschreibt die Anleitung den Einbau von Teflon-Lagern, die Vorgehensweise bei den Misumi Lagern ist jedoch identisch. Ein paar Tips möchte ich jedoch dem geneigten Umbauer mit auf dem Weg geben :
- Wie schon oben gesagt, kann ich für die Arbeiten an den Lagerschalen / Wellenhalterungen nur ordentliches Werkzeug empfehlen. Die Schrauben sind recht fest gezogen und sollten das nach dem Umbau natürlich auch sein
- Die Lager sowie Wellen werden gut eingeölt geliefert (verhindert Ansatz von Flugrost). Beides ist vor der Nutzung mit Isopropanol richtig zu reinigen (die Lager habe ich in einer kleinen Wanne mit Pinsel sogar ausgewaschen). Sind die Lager / Wellen gereinigt und getrocknet, folgt das...
- Füllen der Misumi Lager mit dem LM 47 Fett. Dazu etwas Fett in ein Lager drücken und zB einem Schaschlick-Spieß (Holz) im Lager verteilen, zwischendurch immer mal auf einer Welle hin u herschieben. Man hört ganz gut, wenn die Lager mit Fett gesättigt sind.
- Einweghandschuhe nutzen - die Arbeit mit den gefetteten Lagern ist schon etwas Schmierei und Hautfett (was man bei nackten Handflächen immer abgibt) hat auf blanken Metallteilen eh nichts verloren.
- Zeit nehmen - auch wenn die Arbeit augenscheinlich überschaubar ist, so braucht alles seine Zeit, denn die Wellen und Lager wollen ausgerichtet und parallel montiert werden - das Druckergebnis zeigt Unregelmäßigkeiten bei der Montage sonst deutlich (und das nicht positiv).

Die gereinigten Misumi Lager 
Das Druckbett ist abgebaut 
Die neuen Lager + Wellen und passendes Fett 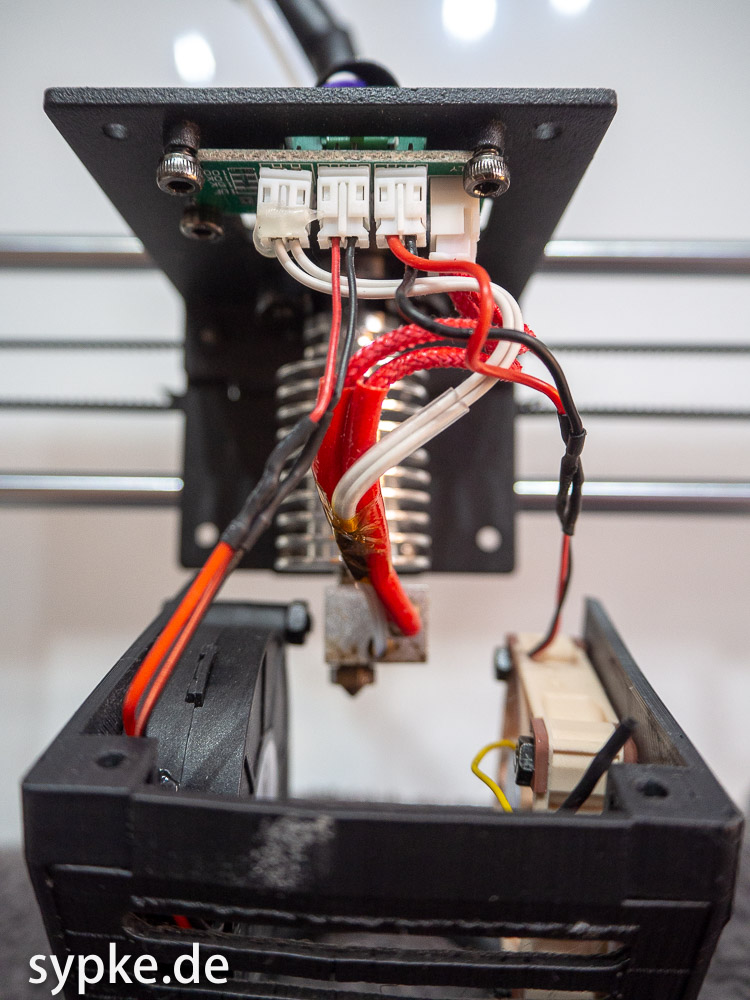
Der Druckkopf im Detail 
Altes und neues Lager mit Lagerbock
Hinweis
** = Amazon Affiliate Link
Ganz klasse erklärt.
Danke für die arbeit
Gerne doch 🙂
Hi Daniel,
Super Arbeit !!
Ich habe die TMC 2208 V3 (Bigtreetech) verbaut und die Marlin Software "Marlin.ino" auf der ArduinoIDE selbst compiliert dort kann man in der
Zeile
Zeile 874-875 die Drehrichtung des Extrudermotors ändern, bei mir war der Wert: false die richtige Richtung
// For direct drive extruder v9 set to true, for geared extruder set to false.
#define INVERT_E0_DIR false // set to false for stock drivers or TMC2208 with reversed connectors
Zeile 565=> kann man durch auskommentieren den originaltreiber für den Extruder einstellen.
//#define E0_DRIVER_TYPE TMC2208_STANDALONE // comment out for stock drivers
Der jetzt übrigens der lauteste motor vom ganzen drucker ist 🙂
Diese Anleitung hat mir auch noch einiges verraten:
https://github.com/davidramiro/Marlin-AI3M
da ich keinen Mega S habe, habe ich nur diese Befehle per Repetier Host an den Drucker gesendet
M502 - load hard coded default values
M500 - save them to EEPROM
Sehr empfehlenswert ist die
PID Kalibrierung
Manual Mesh Bed Leveling
Danke nochmals für deine Anleitung ist echt Spitze und hat mich motiviert das upgrade für den I3 Mega zu machen
Grüße
Johannes
[…] User tauschen auch die Treiberbausteine für die Steppermotoren und die Lager des Anycubic Druckers; bislang habe […]
Hallo Daniel, vielen Dank für die tolle Erklärungen, bist du über mail oder facebook zu erreichen?
Würde deine Anleitung gerne umsetzen aber ist ja schon ein paar Jahre her und die Treiberauswahl erschlägt mich. Könnte deine Hilfe gebrauchen